
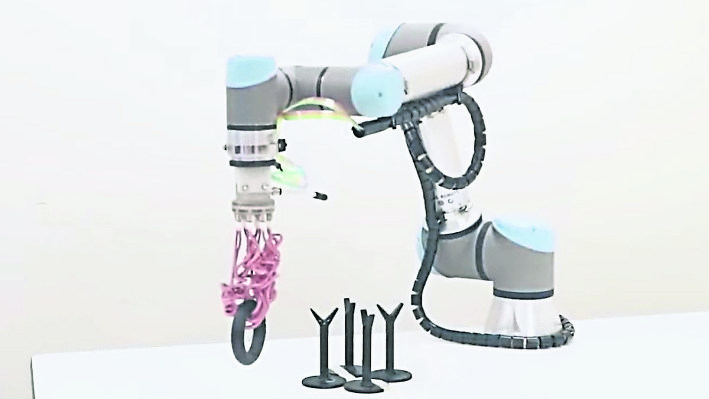
科學研究員受到水母等自然生物以觸手捕捉獵物的現象的啟發,打造出一個具備柔軟觸手的“觸手”機器人,目的在于讓機器人能拿起較脆弱的物品。
若你曾操作過夾娃娃遊戲機,那你就會知道用機器握爪抓住物體有多難。
試想像一下,如果要用夾娃娃機抓起脆弱易碎或易損的瀕危珊瑚或是沉船上的無價之寶,那該有多傷腦筋!
如今,大多數機器人抓取器都是依靠嵌入式傳感器、複雜的反饋迴路或先進的機器學習算法,結合操作者的技能來抓取脆弱或不規則形狀的物體,而來自哈佛工程與應用科學學院 (Harvard John A. Paulson School of Engineering and Applied Sciences,SEAS)的學者近日展示了一種更簡單的方法。
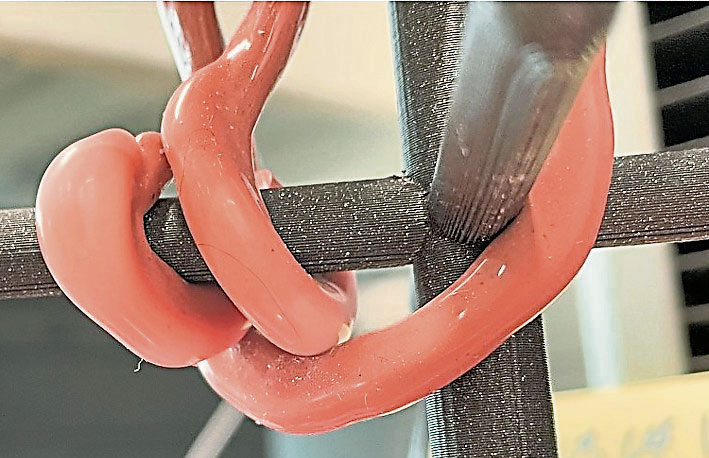
有關學者在從大自然中獲得靈感後,設計了一款具備新型柔軟觸手的“觸手機器人”(Tentacle robot),即以具備相當不錯的摩擦力的空心橡膠管線,通過管身前後的厚度差異,使這些觸鬚在充氣後可不斷蜷曲。
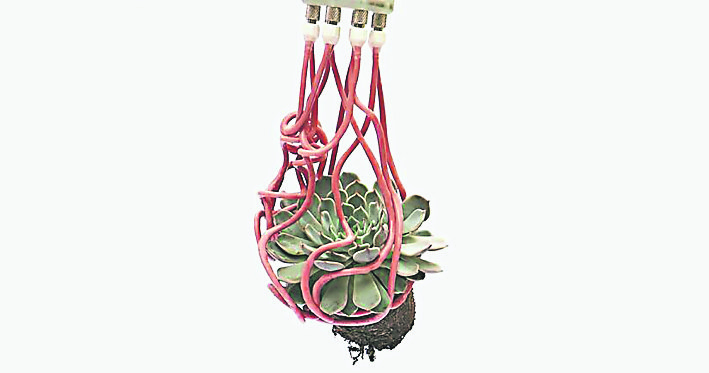
這款機器人的人工觸手是由一英尺長的空心橡膠管組成,軟管一邊的橡膠較另一邊厚,平時呈垂吊型,而當管內注入空氣時,軟管則會蜷曲起來。橡膠管蜷曲起來的動作和角度為隨機的設計,不過,當很多橡膠管在物件旁邊蜷曲時,即有很高的機率勾起有關物件。
雖然多根橡膠管加總的握力大,但單一根橡膠管的握力則很弱,因此,這些橡膠管在拿起易碎物品時,較不會傷到有關物品。而這種夾持器是依靠簡單的膨脹度來包裹物體,若要讓機器人放開物品時,則僅需釋放壓力即管內氣體,橡膠管即會回到原來垂吊的狀態。
這技術的高明之處在於它大大的降低了機器手臂抓取細緻物件的難度,並提供了相當大的容錯率與適應力(不需要精密感測與規劃或反饋控制),構造也非常簡單。
擴大取物種類 但難精準放回原位
哈佛工程與應用科學學院的教授Robert Wood說,觸手機器人的新發明取代了過去需要複雜控制的傳統握爪,而新握爪是通過型態複雜的管狀體,所以就僅需簡易的控制方式。
研究員相信這項新觸手的握爪將可拿起植物、蔬果,甚至是玻璃器皿。不過,這項技術也不是沒有缺點,由於橡膠管蜷曲的動作為隨機,因此相較於機器吸盤,觸手在拿起物品後,操作者較難以將觸手所抓的物品精準地放回原來位置。
目前,這項技術的瓶頸應是在於觸手前緣的力量不足以撐起多數物體,若用於生產線,這項缺陷將造成問題。
不過,學者也歸納出初步結論,即新觸手的握爪功能仍擴大了機器人可拿取的物品的種類,且相信在成本等各方面都有其值得繼續發展之處。
文 \ 蔡宗桓